

Содержание:
- Вступление
- Промышленных роботов можно разделить на 6 основных типов.
- Разница заключается в типе соединения и механической конструкции.
- Оси робота как суставы человека
- ТИПЫ РОБОТОВ
- Сферический робот, с полярной системой координат. (POLAR COORDINATE ROBOT)
- Цилиндрический робот (CYLINDRICAL COORDINATE ROBOT)
- Линейный робот (Декартов робот) (Cartesian robot).
- Шарнирный робот (ARTICULATED ROBOT)
- SCARA робот (SELECTIVE COMPLIANCE ASSEMBLY ROBOT ARM)
- Параллельный робот (Дельта робот, робот-паук)
- Заключение
Вступление
Первый промышленный робот в Японии был произведён полвека назад. В 1968 году компания Kawasaki Heavy Industries подписала лицензионное соглашение с американской венчурной компанией Unimation и начала собственное производство в Японии. Первый японский промышленный робот под названием «Kawasaki-Unimate 2000» был выпущен в 1969 году.
С этого момента производство промышленных роботов, преимущественно сфокусированное на автомобильной промышленности, начало набирать обороты. Компания Kawasaki стала одним из крупнейших производителей промышленных роботов, заняв большую долю на мировом рынке и создав основу для того, чтобы Япония стала всемирно признанным «Королевством робототехники». Можно считать, что промышленная робототехника родилась в США, но выросла в Японии.
Промышленных роботов можно разделить на 6 основных типов.
Сегодня промышленные роботы используются не только в автомобильной промышленности, но и при сборке электроники, и в пищевом производстве. Роботы успешно используются для решения многих задач: сварка, покраска, сборка, паллетирование. Для того, чтобы наилучшим способом адаптироваться к каждому типу задачи — промышленные роботы бывают различных типов, различных конструкций и с разными функциями.
Несмотря на большое разнообразие, решаемых роботом, задач, и вариаций конструкции, выделяют 6 основных типов роботов.
Разница заключается в типе соединения и механической конструкции.
Существуют различные способы структуризации промышленных роботов: по размеру, нагрузке, сфере применения. В этой статье мы остановимся на структуризации по типу соединения звеньев робота и механической конструкции.
Оси робота как суставы человека
У роботов могут быть и вращательные и линейные оси. Количество соединений в роботе является количеством осей или степеней свободы (DOF). Количество и типы соединений звеньев робота будет для нас основным фактором, позволяющим нам определить тип робота.
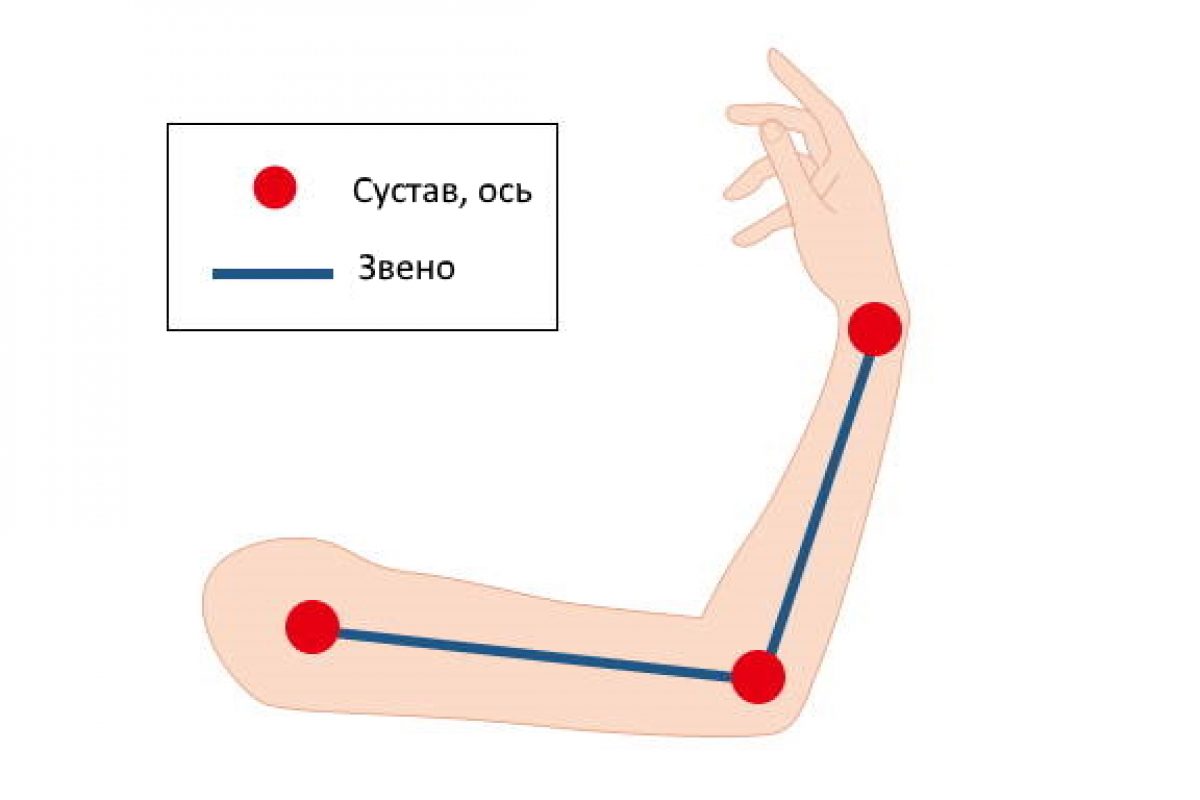
Можно найти много схожего в строении суставов робота и человека. Чаще всего двигатели вращают суставы робота, подобно как мышцы вращают запястье человек или сгибают руку в локте. Но есть и то, что у человека нет – это линейные соединения звеньев робота, позволяющие выдвигать вперёд/назад или верх/вниз сустав робота.
У каждого промышленного робота есть инструмент, который, как правило, крепится на запястье – это может быть сварочная горелка или захват. Для перемещения инструмента требуется как минимум три сустава, чтобы двигаться по трем осям координат. Для ориентирования сустава с инструментом, потребуется ещё 3 оси.
ТИПЫ РОБОТОВ
Теперь вы знаете основы, перейдем к основным типам роботов.
Сферический робот, с полярной системой координат. (POLAR COORDINATE ROBOT)
Первый промышленный робот

Этот робот имеет центральный поворотный вал как у башни танка и удлиняющуюся руку с вращающимся запястьем. Рука, способная удлиняться предназначена для достижения большого радиуса действия. Такой тип роботов широко использовался на заре промышленной робототехники. Робот Kawasaki-Unimate 2000, как раз этого типа.
Ниже редкое видео демонстрирующее работу первого японского промышленного робота Kawasaki-Unimate 2000
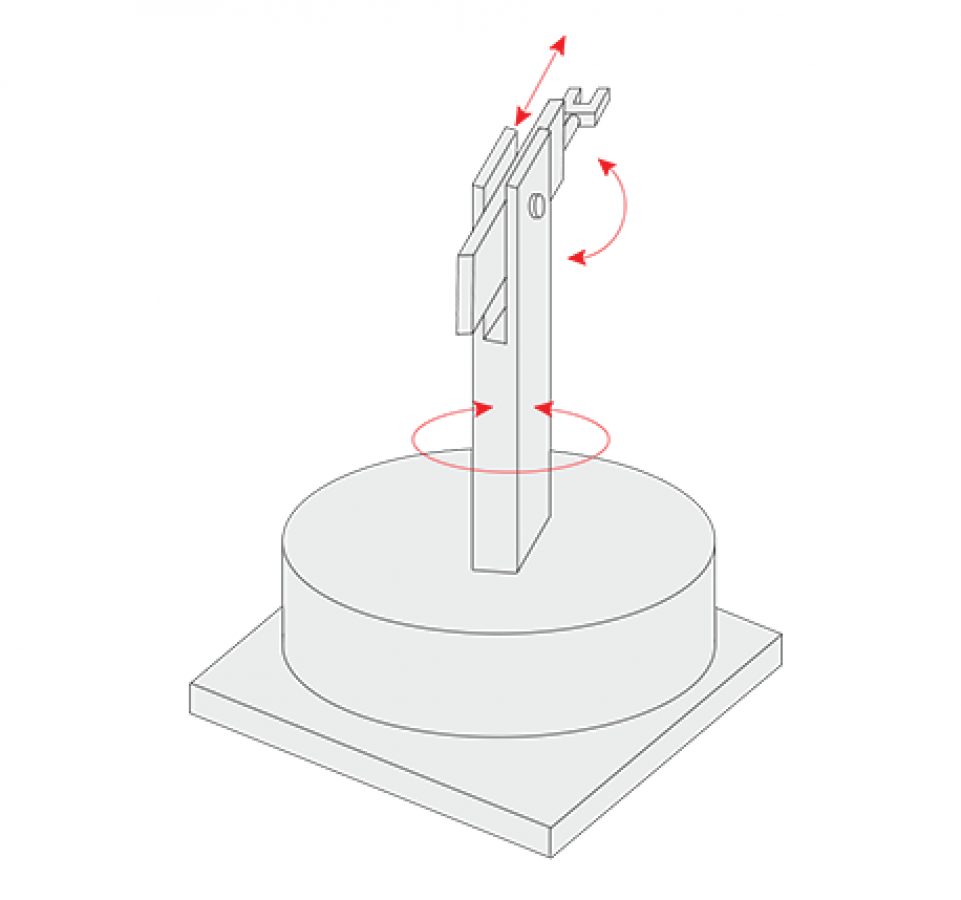
Цилиндрический робот (CYLINDRICAL COORDINATE ROBOT)
Робот с 50-летней историей.
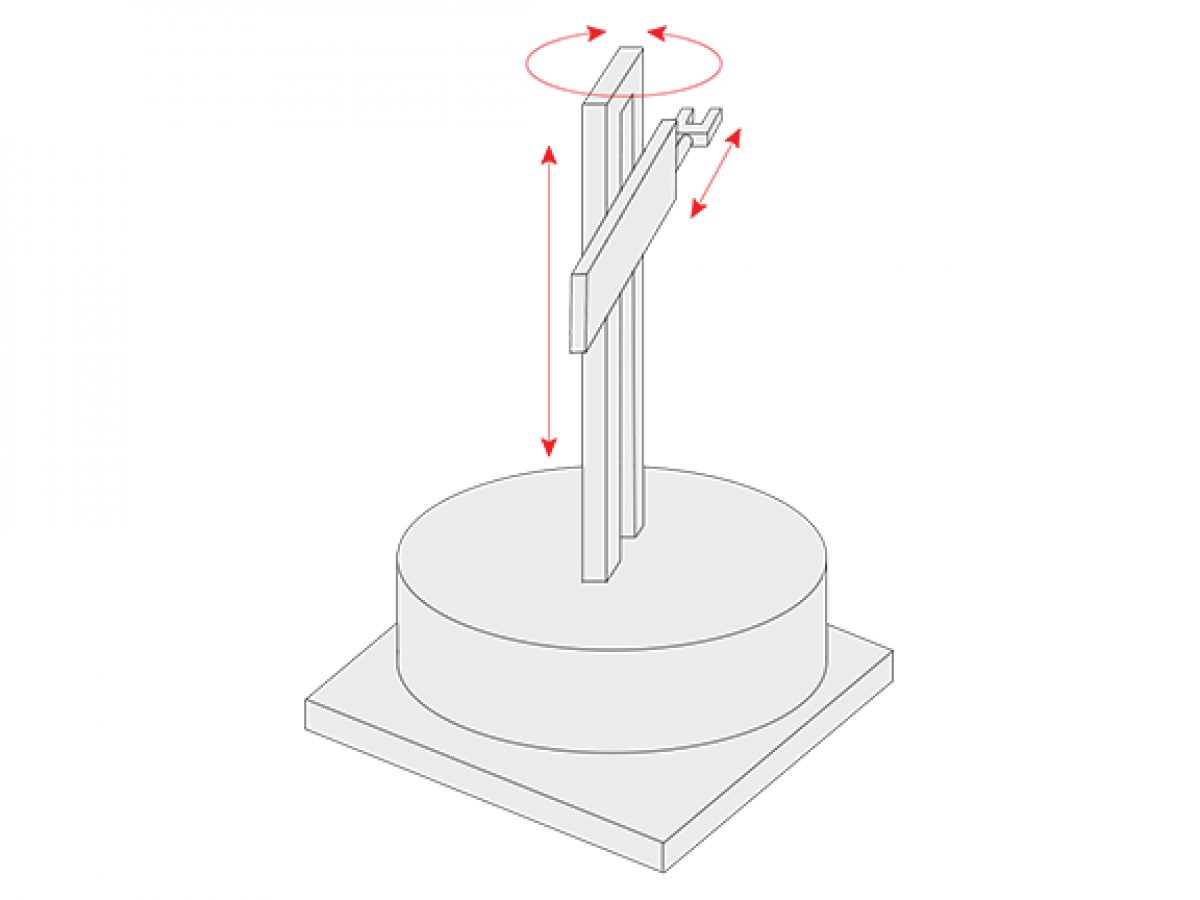
Этот робот похож на робота с полярной системой координат — у него также есть выдвигающаяся рука и поворотный вал. Но разница заключается в движении руки робота, которая может двигаться по вертикали, скользящим линейным, а не вращающимся движением. Сегодня роботы этого типа по-прежнему используются, например, для переноса LCD панелей для мониторов.
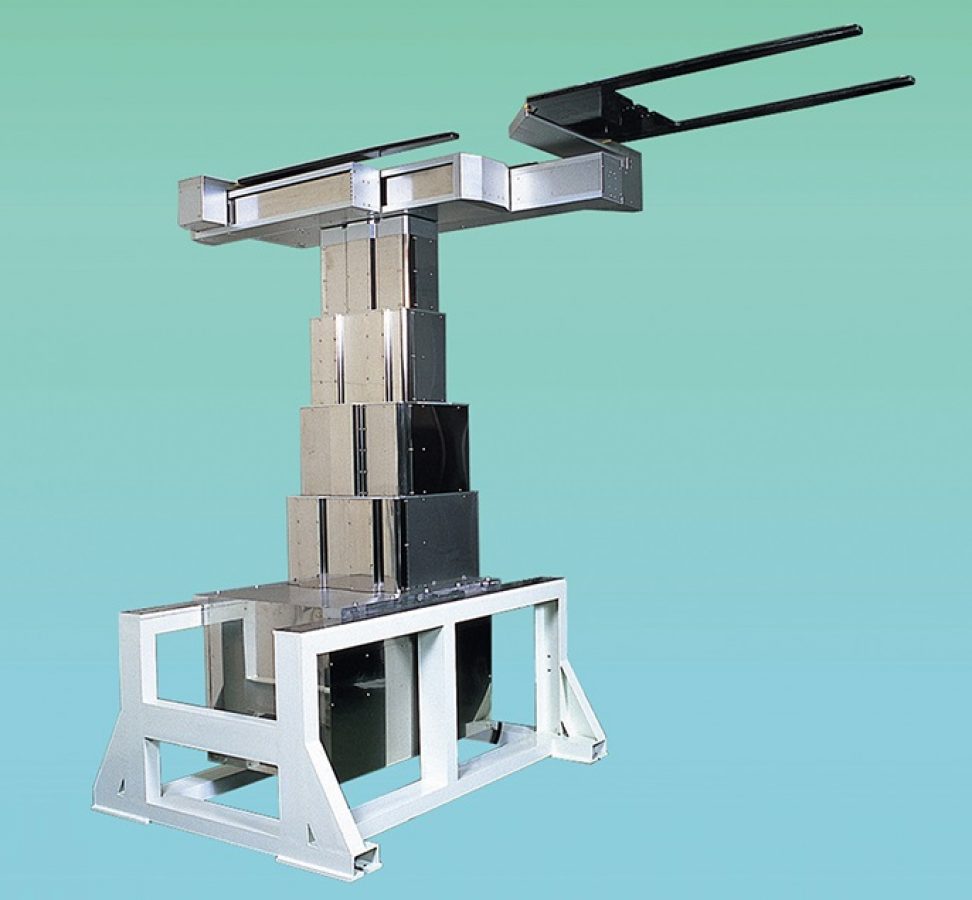
Линейный робот (Декартов робот) (Cartesian robot).
Простой в управлении.
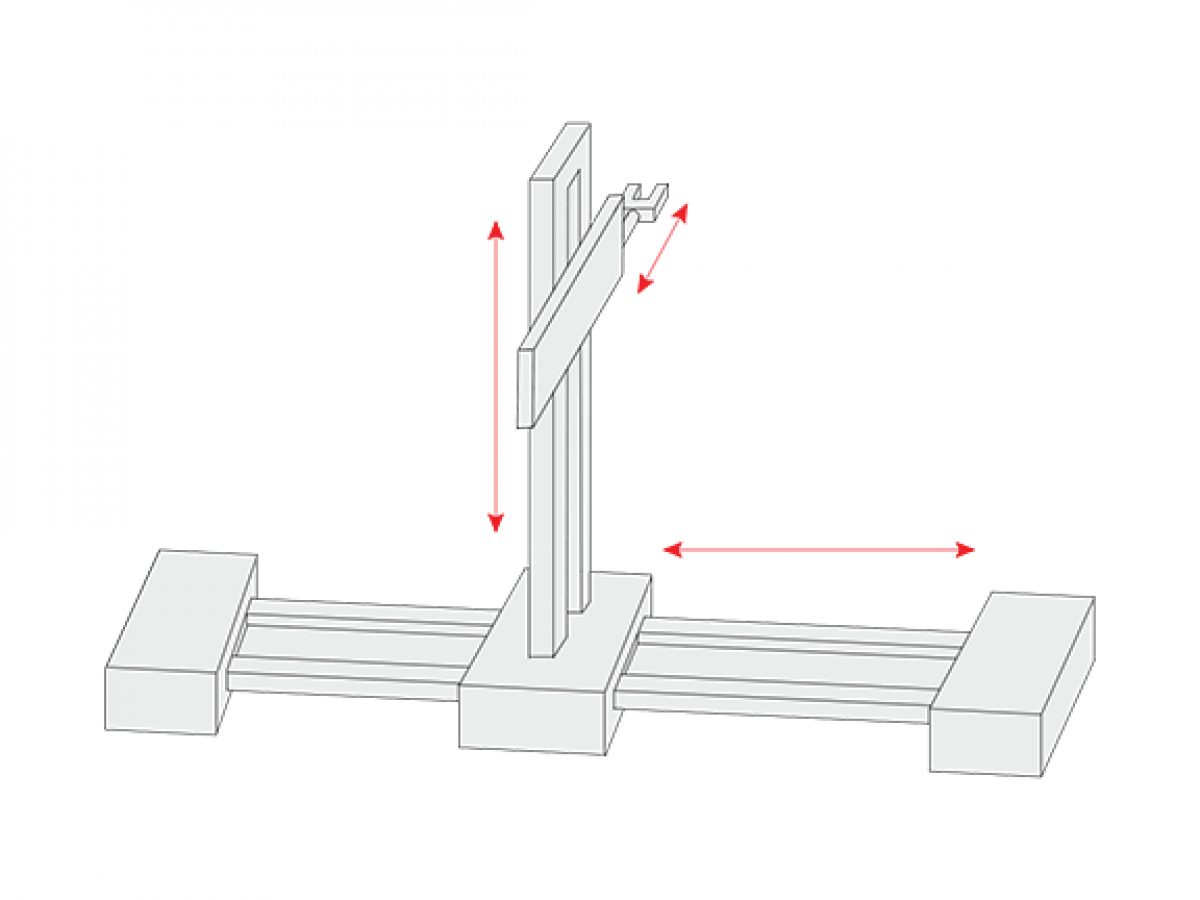
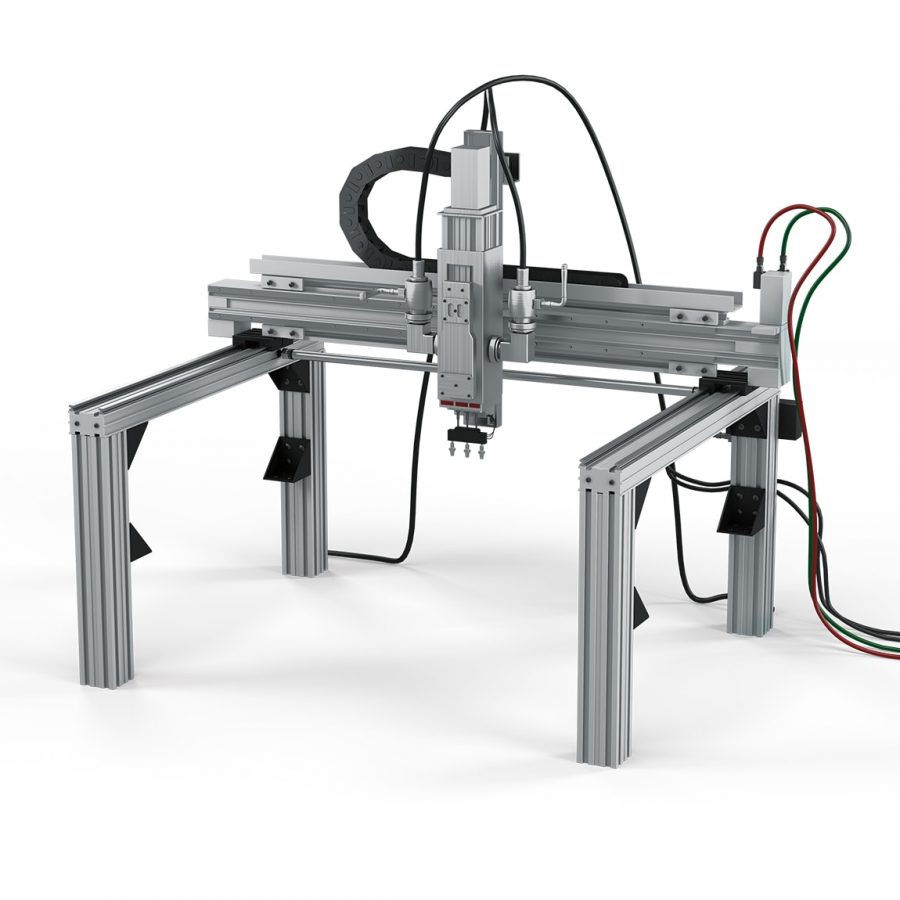
Робот, работающий в прямоугольной системе координат. Движения этого робота похожи на игровой автомат, в котором нужно достать игрушку. Все звенья робота двигаются по трём перпендикулярным осям и не вращаются. Как правило, такой робот имеет большие габариты, но высокую точность и простоту в управлении. Этот тип роботов чаще применяется для перемещения тяжелых инструментов, а в качестве инструмента можно использовать даже целого робота.
На видео, пример конструкции с линейными осями с подвешенным шарнирным роботом Kawasaki
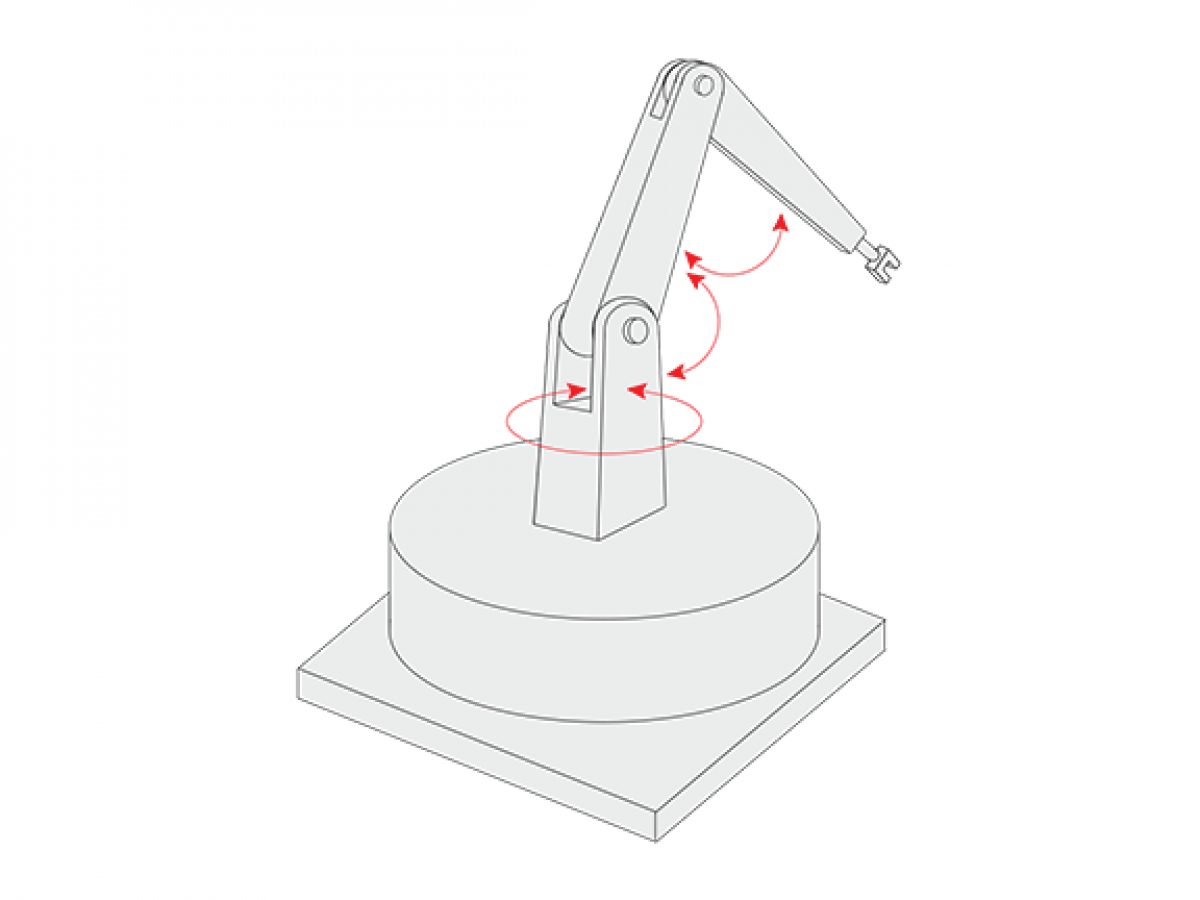
Шарнирный робот (ARTICULATED ROBOT)
Высокая гибкость движений

На фото универсальный робот Kawasaki BX300L грузоподъемностью 300 кг
Сегодня это самый распространенный промышленный робот. Конструкция представляет собой последовательно соединённые звенья. Каждое следующее звено крепится к концу другого. 6-ти осевой шарнирный робот имеет такую же подвижность, как и человеческая рука. Но считается, что программирование таких роботов гораздо сложнее. Однако, благодаря современным контроллерам Kawasaki, процесс создания управляющей программы чрезвычайно прост. Этот тип роботов используется для очень широкого круга задач, таких как палетирование, обслуживание станков, дуговая или точечная сварка и многое другое.
Пример современного 6-ти осевого шарнирного робота Kawasaki RS007L.
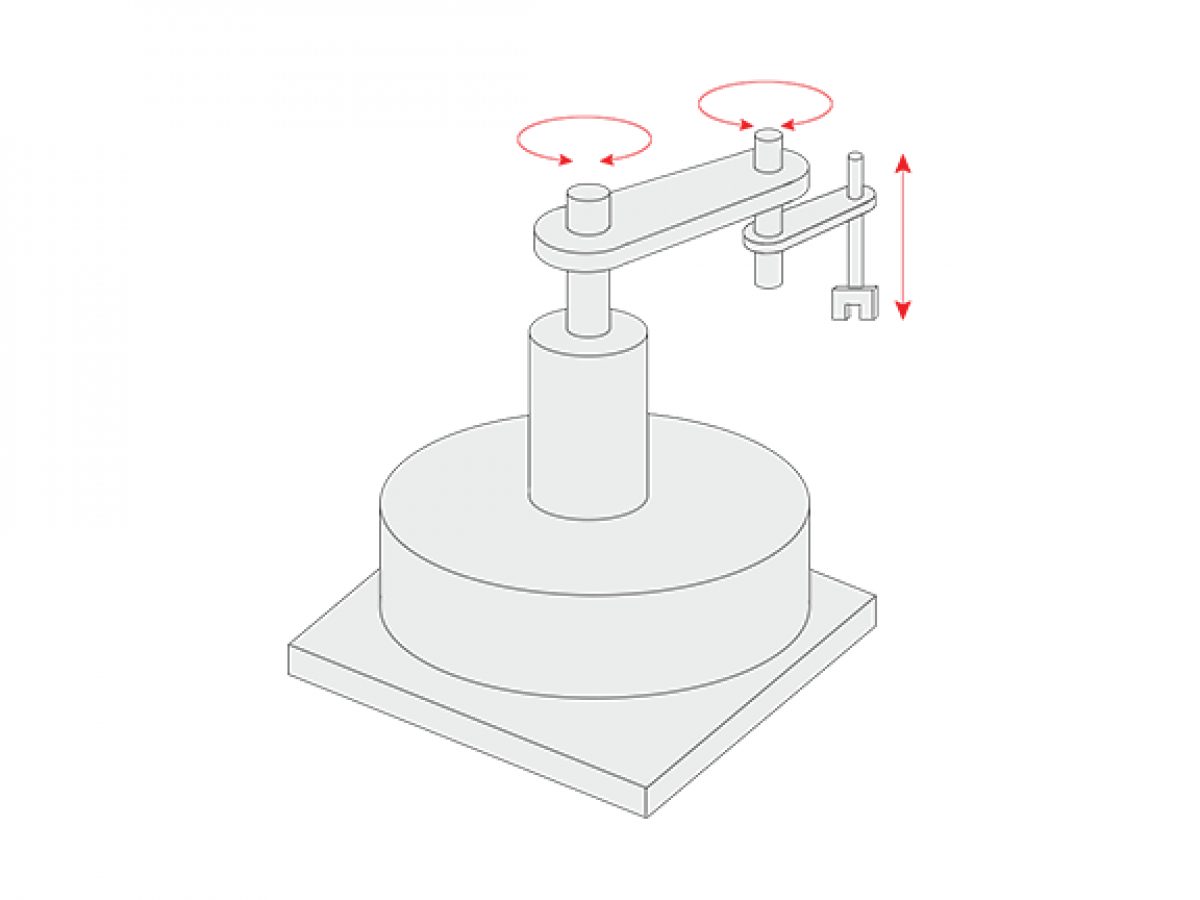
SCARA робот (SELECTIVE COMPLIANCE ASSEMBLY ROBOT ARM)
Сборщик

На фото двурукий робот Kawasaki duAro1
Этот робот отличается тем, что все основные звенья перемещаются только в горизонтальной плоскости. И только инструмент на конце руки двигается в линейном направлении. За счёт высокой жесткости в вертикальном направлении роботы SCARA достигают высокой точности и скорости с двигателями меньшей мощности. Роботы с такой конструкцией наиболее востребованы в операциях по сборке. К примеру, SCARA робот duAro успешно применяется на заводах по сборке печатных плат и размещению полупроводниковых пластин.
На видео ниже представлена работа двухрукого робота DuAro. Робот собирает печатные платы.
Параллельный робот (Дельта робот, робот-паук)
Когда скорость важна
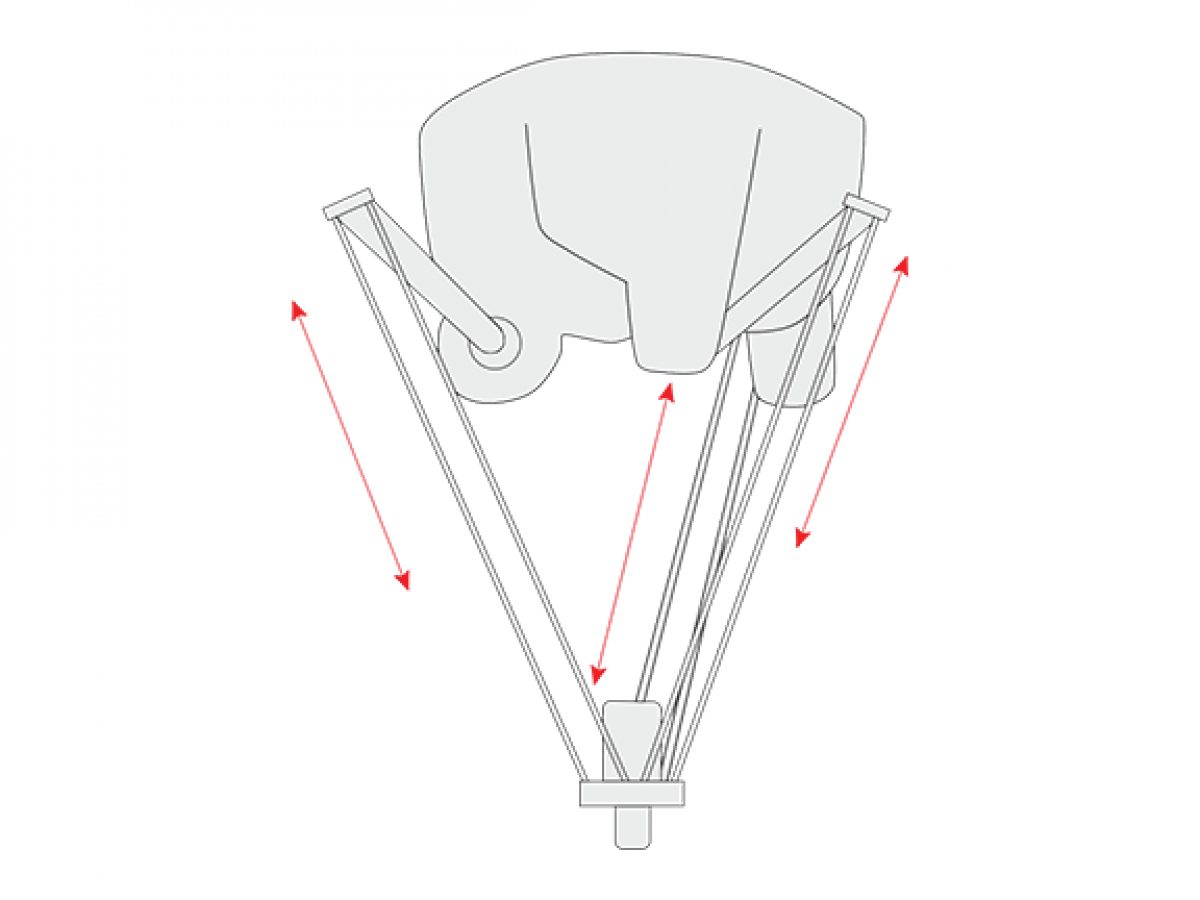

На фото высокоскоростной робот Kawasaki YF003N
Ключевым отличием таких роботов является конструкция из нескольких звеньев, прикрепленных к общему основанию, позволяющий сохранять пространственную ориентацию инструмента робота. Чаще всего дельта робот состоит из трёх таких рычагов. Все три рычага одновременно поддерживают захват робота на одинаковой высоте. Обладают высокой скоростью и применяются для операций сортировки или укладки цельной продукции в короба, и, как правило, устанавливается над конвейером.
На видео показано как робот YF03N сортирует листки базилика по размеру.
Заключение
Все вышеперечисленные роботы являются промышленными, но каждый отличается своими характеристиками: грузоподъёмностью, диапазоном рабочей зоны, точностью, скоростью, габаритами. В зависимости от типа соединения звеньев и конструкции каждый робот находит своё оптимальное применение, свою задачу с которой справляется лучше других.
При автоматизации вашего конкретного процесса важно понимать различные доступные варианты решения задачи, чтобы вы могли выбрать лучший тип промышленного робота под вашу задачу.
Если вы хотите обсудить, какой тип роботов лучше всего подходит для вашей конкретной задачи, свяжитесь с нами по телефону 8(812)209-11-03 или по адресу info@robowizard.ru