Производитель: Kawasaki Robotics
Категория: Малая-средняя нагрузка 3-80 кг
Грузоподъемность 15 кг
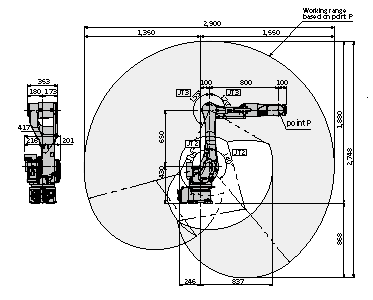
Радиус действия 1550 мм
Количество осей 6
Точность 0,04 мм
Заказать товар или консультацию
Грузоподъемность: 15 кг
Радиус действия: 1550 мм
Количество осей: 6
Точность: 0,04 мм
| BU015N | |||
| Тип | Шарнирный робот | ||
|---|---|---|---|
| Управляемых осей (Степени свободы) | 6 | ||
| Полезная нагрузка на кисть (кг) | 15 | ||
| Предельная досягаемость (мм) | 1 550 | ||
| Повторяемость (мм) ✽1 | ±0.04 | ||
| Угол поворота (°) | Рука вращение (JT1) | ±180 | |
| Рука вперед-назад (JT2) | +140 - −105 | ||
| Рука вверх-вниз (JT3) | +155 - −120 | ||
| Запястье поворот (JT4) | ±210 | ||
| Запястье сгиб (JT5) | ±1320 | ||
| Запястье вращение (JT6) | ±360 | ||
| Максимальная скорость (°/s) | Рука вращение (JT1) | 250 | |
| Рука вперед-назад (JT2) | 250 | ||
| Рука вверх-вниз (JT3) | 215 | ||
| Запястье поворот (JT4) | 280 | ||
| Запястье сгиб (JT5) | 280 | ||
| Запястье вращение (JT6) | 360 | ||
| Момент силы (N•m) | Запястье поворот (JT4) | 27 | |
| Запястье сгиб (JT5) | 27 | ||
| Запястье вращение (JT6) | 22 | ||
| Момент инерции (kg•m2) | Запястье поворот (JT4) | 0.7 | |
| Запястье сгиб (JT5) | 0.7 | ||
| Запястье вращение (JT6) | 0.25 | ||
| Масса (кг) | 160 | ||
| Цвет корпуса | соответствует Munsell 10GY9/1 | ||
| Монтажное положение | Пол | ||
| Условия окружающей среды (эксплуатации) | Температурный режим (°C) | 0 - 45 | |
| Относительная влажность (%) | 35 - 85 (строгое отсутствие конденсата или инея) | ||
| Требования по электропитанию (kVA) ✽2 | 5.6 | ||
| Контроллер | Америка | E51 | |
| Европа | |||
| Япония и Азия | |||
✽1: Значение соответствует ISO9283.
✽2: В зависимости от нагрузки и характера движения.